Conheça os dados ricos que podem ser explorados através da Rede CAN e o protocolo J1939.

Com o aumento da utilização de sistemas eletrônicos compostos por vários microcontroladores, microcomputadores e periféricos inteligentes no controle de veículos, aumentou-se também o número de fios para que toda essa eletrônica possa funcionar. Com isso, os protocolos de rede ganharam bastante importância. Objetivando simplificar esses sistemas complexos de fios, em 1986 Robert Bosch desenvolveu a rede CAN, como uma maneira de centralizar todas essas informações do veículo. O projeto da Bosch, se estendeu a diversos segmentos automotivos, e hoje é uma das ferramentas mais importantes para a telemetria veicular.
Na agropecuária, por exemplo, uma das principais necessidades indicadas é a compatibilidade de programas computacionais e de equipamentos para se obter benefícios em escala através de inovações criativas em controle da irrigação, estufas, máquinas agrícolas, criadouros, entre outros e, para suprir essa necessidade tem sido adotado a CAN.
Atualmente encontramos padrões baseados na rede CAN em quase todos os tipos de veículos, como caminhões, ônibus, barcos, satélites, máquinas agrícolas e de construção civil, entre outros.
O que é e como funciona a rede CAN?
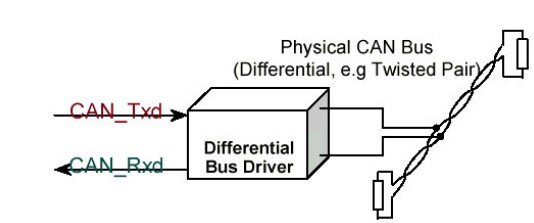
A rede CAN (Controller Area Network), que em tradução literal significa Área de Controle de Trabalho. É uma rede inteligente do veículo que é vinculada com todos os módulos do carro, substituindo os fios de informação de cada sistema por dois fios de comunicação (CAN HIGHT e CAN LOW) trançados que obtém todas as informações e enviam para os dispositivos de controle do veículo. O par de fios trançado é terminado com um resistor tipicamente de 120 Ohms em cada ponta da linha para evitar o eco de dados e falsas informações.
Os módulos que fazem parte da rede CAN se comunicam várias vezes por segundo e possuem um sistema que reconhecem as informações (zeros ou uns obtidos através da diferença de tensão entre os fios de comunicação) e interpretam ou não o sinal recebido. Por exemplo: caso a informação recebida seja sobre freio, ela não é válida para o sistema de iluminação e, para este ela é descartada e aceita apenas para o sistema de frenagem.
Porque os fios devem ser trançados?
O cabeamento por par trançado, também chamado de Twisted pair é utilizado para cancelar as interferências eletromagnéticas de fontes externas e interferências mútuas – linha cruzada ou crosstalk entre cabos vizinhos.
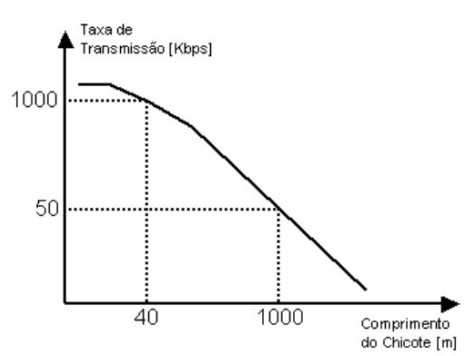
Com o par de fios trançado, a taxa de transmissão máxima no barramento é 1 MBaud para um cabo de até 40 metros. Para comprimentos maiores que 40 metros a taxa de transmissão deve ser reduzida. Para um barramento de 1000 metros a taxa de transmissão ainda pode chegar a 50 KBaud. Comprimentos maiores que 1000 metros devem usar drivers especiais.
Endereçamento e características do barramento
Os nós representam qualquer componente conectado à rede e capaz de enviar ou de receber dados e seu número não está limitado pelo protocolo, podendo ser mudado dinamicamente – inserindo ou retirando – sem perturbar a comunicação dos outros nós. No protocolo CAN, os nós do barramento não têm um endereço específico. A informação de endereço é contida no identificador das mensagens transmitidas que indica o conteúdo da mensagem e a prioridade da mesma (quanto menor for o valor do identificador maior será a prioridade). O identificador informa qual é a mensagem (temperatura do motor, velocidade, rotação, etc.). Desta forma, uma mensagem não é enviada por um transmissor somente a um receptor, mas sim, cada unidade que se mostrar interessada pela mensagem pode recebê-la.
Protocolo J1939
A rede CAN possui diversos protocolos de comunicação e um deles é o protocolo J1939. Este protocolo é um padrão de rede utilizado em diversos equipamentos e veículos que são alimentados com controles eletrônicos.
Uma característica importante desse protocolo é o grupo de parâmetros, esses grupos são definidos como sinais semelhantes entre si e são definidos por um número chamado PGN (Parameter Group Number) e os grupos com até 8 bytes são transmitidos automaticamente ou mediante solicitação no frame CAN.
No protocolo J1939 estão presentes dois grupos de PGNs: Globais e Específicos. Os globais são utilizados para todas as ECUs (Engine Control Unit – Unidade de Controle do Motor). Os específicos são utilizados para grupos de parâmetros que são enviados para ECUs em particular (ponto a ponto).
Snitch
Em outro artigo apresentamos pra vocês o SNITCH que é um transmissor versátil, inteligente e modular, desenvolvido para funcionar como a interface de dados entre os sensores e a aplicação final de uma solução IoT, buscando possibilitar soluções em vários segmentos.
Leia: Nova economia. Novos desafios. Novas soluções Effortech para o seu negócio
O Snitch como um comunicador inteligente já possui o protocolo J1939 embarcado, possibilitando que o mesmo seja utilizado para leitura CAN de qualquer máquina ou equipamento agrícola, bem como caminhões, sempre variando as informações a depender dos dados disponibilizados pelo fabricante.
Atualmente, temos mapeadas as principais PGNs da telemetria: consumo, nível, temperatura e pressão de combustível, velocidade e torque do motor, presença de água no combustível, nível do óleo do motor, identificação do veículo, entre outras.
Ficou com alguma dúvida? Converse agora com um de nossos consultores! A Effortech conta com uma equipe altamente e qualificada para te orientar quanto às melhores soluções em telemetria do mercado